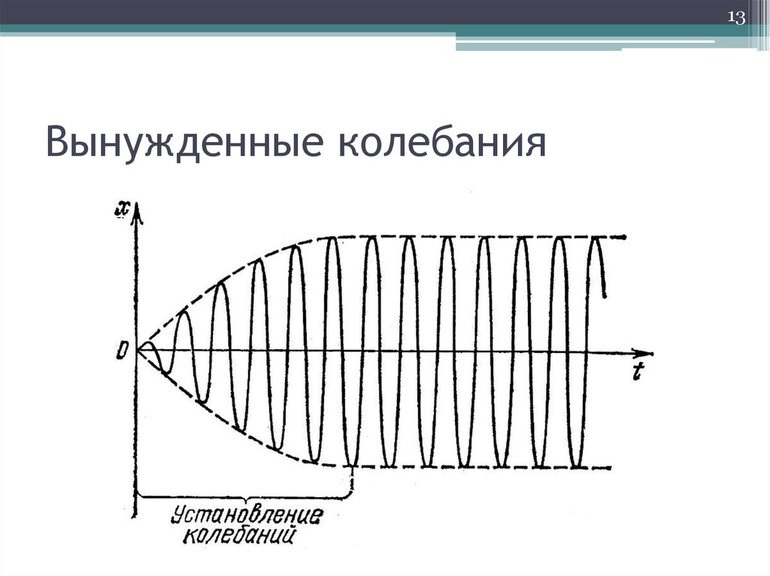
Вынужденные колебания - характеристика, условия возникновения и примеры
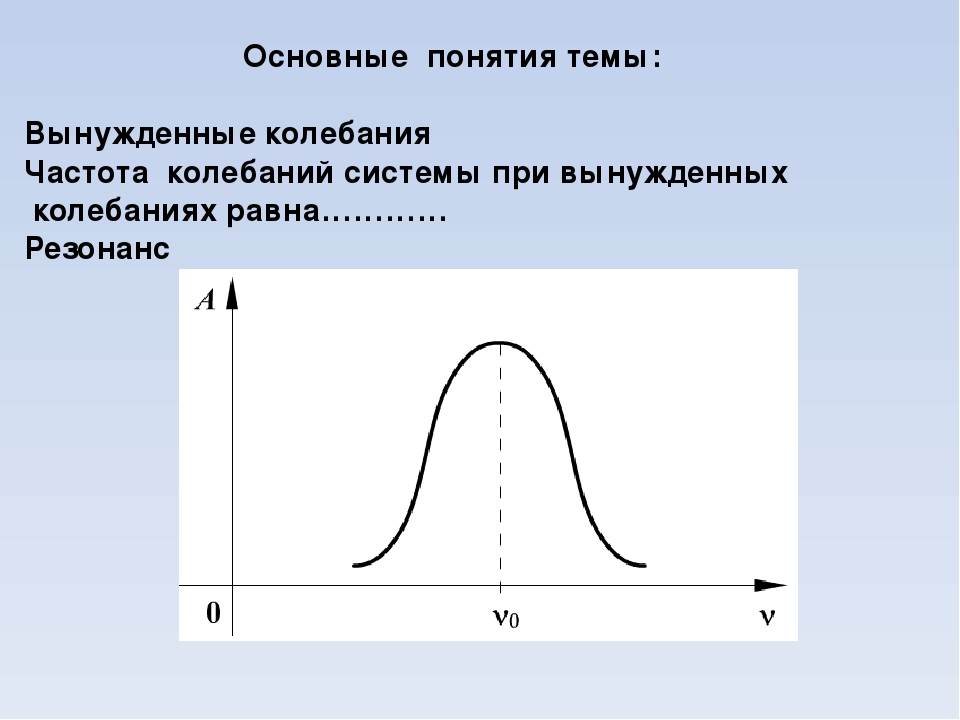
При колебаниях может наступить момент приближения частоты вынуждающего воздействия к собственной частоте движения системы. В этом случае физики говорят, что установился резонанс. Другими словами, происходит амплитудное возрастание вынужденных колебаний при равенстве циклической частоты, которую называют резонансной. На графике зависимостей A от w кривая, описывающая явление, имеет наибольшую величину.
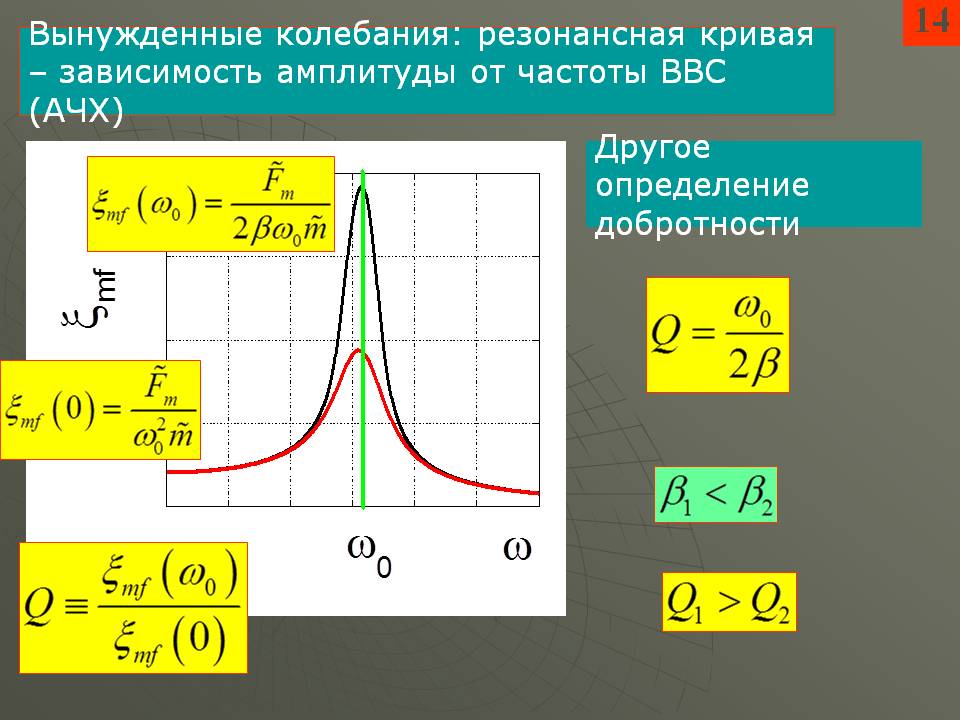
Амплитуду можно вычислить по формуле: A = F/2 gm √( w2 — g), где g — коэффициент затухания, то есть чем больше g, тем более будет сдвинут максимум к нулевой отметке на графике. Лучше проявляется резонанс в системах, характеризующихся малым затуханием. В ином случае циклическая частота будет мнимой, а амплитуда — монотонно уменьшаться.
Описывать колебательную систему можно через добротность (Q). Эта величина определяется из отношения энергии, которую удалось накопить, к значению её расхода за один период. С помощью этого параметра определяют качество, так как чем добротность больше, тем меньше система теряет энергию. Для любого механического периодичного движения её можно вычислить так: Q = √ (m * k) / r = (w * m) / r, где: m — масса системы, k — жёсткость, r — сопротивление.
В качестве нежелательного примера резонанса при вынужденных колебаниях можно привести работу двигателя внутреннего сгорания. В нём имеется коленчатый вал, на который оказывает воздействие шатун. При этом период изменения сил зависит от угловой скорости вращения вала. Вызываются колебания, которые при резонансе приводят к повышению напряжения оси и в дальнейшем вызывают её поломку, поэтому для борьбы с резонансом используют различные поглощающие материалы.
При помощи явления можно выделить или даже усилить довольно слабые периодические колебания. В радиотехнике его используют для получения полезного сигнала, усиления звука. Что интересно, впервые о резонансе заговорил Галилео Галилей в 1602 году, исследуя движения маятников и музыкальных струн. Он предположил, что резонанс — это отклик на силу извне, при котором происходит синхронизация частот колебаний с воздействующей на неё внешней силы. Это явление приводит к росту амплитуды движения всей системы.
Ширина кривой
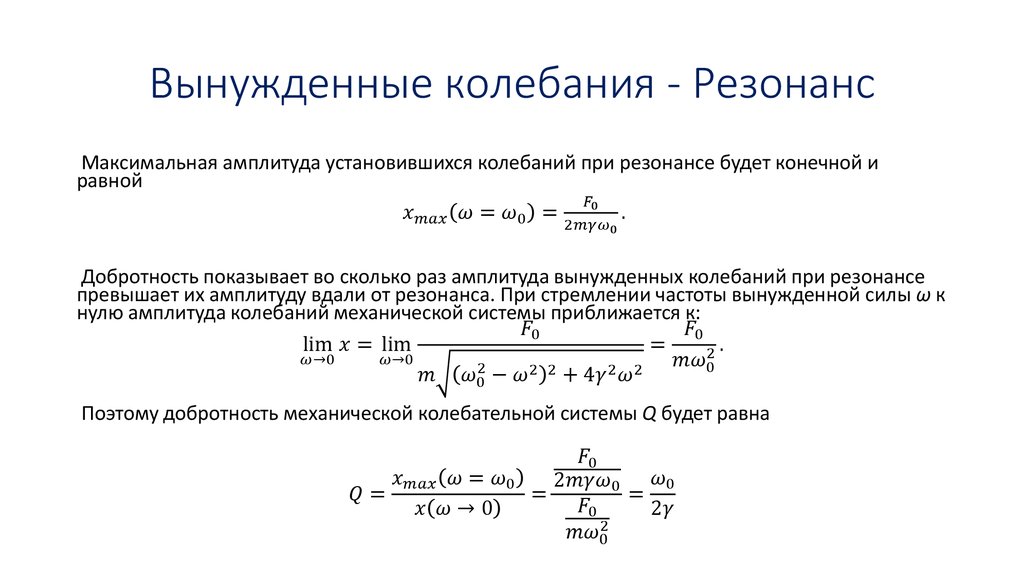
При резонансе амплитуда колебаний максимальная. Следовательно, и энергия, запасённая системой, будет наибольшей. Она может быть равной: E = (½) * (mw2A2). Отсюда следует, что резонансную энергию возможно вычислить по формуле: E = (½) * (mw2 * A рез 2 ), причём Арез = F / (m * 2w). Стоит только изменить частоту вынуждающей силы, то есть её уменьшить или увеличить, амплитуда колебаний резко упадёт. Если система будет высокодобротной, при небольшом смещении энергия уменьшится.
Пусть w1 и w2 частоты, на которых E будет составлять половину от значения, присущего резонансу. Можно составить систему из двух уравнений: E (w1) = (1 / 2) * (m * w12 * A2(w1)) и E (w2) = (1 / 2) * (m * w22 * A2(w2)).
Выражения A2(w1) и A2(w2) являются амплитудами при отстройке от резонанса. Связь их с A (w) будет следующей: (1 / 2) * (m * w122 * A2(w12) = (1 / 2) * (1 / 2) * (m * w02 * A2рез). В полученном равенстве можно сократить массы, число ½ и учитывая, что при высокой добротности w1 ≈ w 2 ≈ w0, убрать из формулы частоты. В итоге получится уравнение: A2(w12) = (½) * Aрез. После извлечения корня зависимость примет вид:
- A (w1) = (1 / √ 2) * Aрез;
- A (w1) = (1 / √ 2) * Aрез.
Разность w1 и w2 будет называться половинчатой шириной резонансной кривой, то есть коэффициент затуханий можно найти как a = Δw/2. Измерив ширину кривой, можно узнать фундаментальную характеристику колебательной системы — коэффициент затухания.
Через это определение легко вычислить и добротность. Она равняется: Q = w0 / 2a. Чтобы её найти, необходимо центральную частоту разделить на ширину резонансной кривой: Q = w0 / Δw. Получается, что чем выше будет добротность колебательной системы, тем уже резонансная кривая.
В качестве примера вынужденных колебаний механического типа можно привести язычковый частотомер. Это прибор, работа которого основана на использовании резонанса. Устройство его состоит из электромагнита, над которым располагаются металлические пластины, разные по длине. Под действием поля они начинают колебаться. В сети частота тока 50 Гц, если создаётся вынуждающая сила на 100 Гц, язычок, настроенный на это значение, начинает резонировать.
Электромагнитный резонанс позволяет выделять радиостанцию. Ещё из ярких примеров вынужденных колебаний можно отметить: движение мембраны телефона, ход иглы швейной машинки и поршня в цилиндре автомобиля, компенсацию возмущений едущего по неровной дороге авто за счёт рессоры, океанические приливы под действием Луны.
Еще полезные статьи:





